FloorBot
Some of us may say at one point of our lives: “Gee, I wish I had a robot that could
Read more.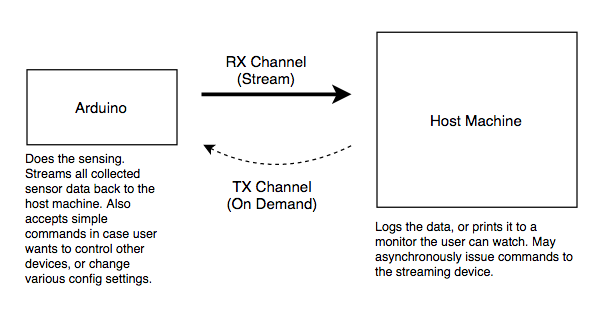
Serial Data Loggers: RX Stream Handling
A common task in any engineering environment is realtime data logging. Of the many ways to do this, my current
Read more.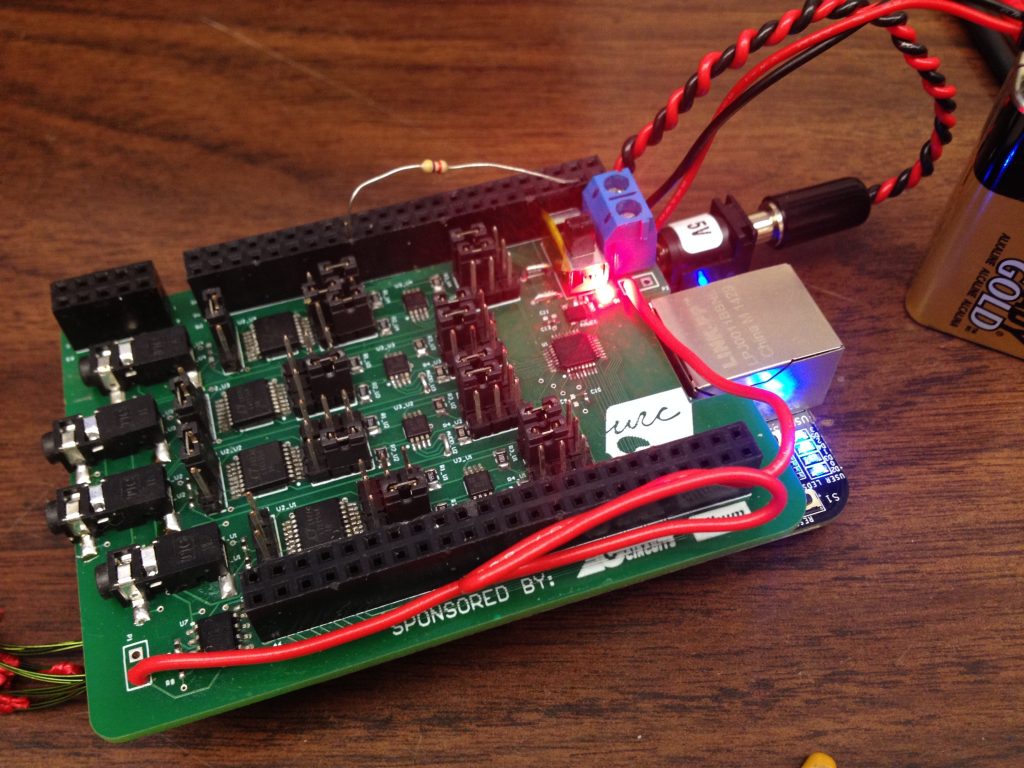
Beaglebone Black Underwater Acoustics System: Part 2
Background The last post focused on a very early test of the ADS7865, where it was discovered that just controlling
Read more.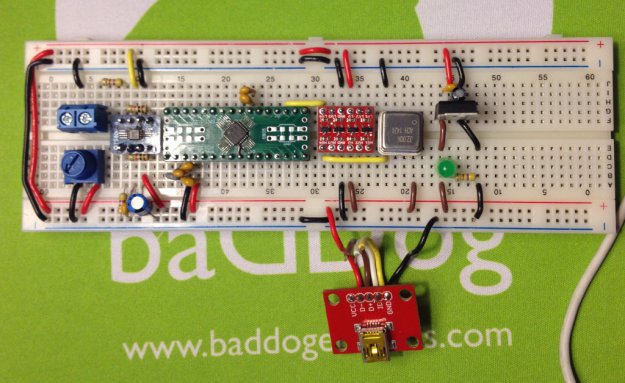
Beaglebone Black Underwater Acoustics System: Part 1
Intro This write-up is meant to document a recent test of the ADS7865, a stand-alone analog to digital converter (ADC) IC.
Read more.
Portable EKG
Conception: This project began from an oversimplification. One day, I wondered: “How hard can it be to make an EKG?
Read more.